
El sistema de referencia sobre la propia trayectoria La velocidad se define como: y se expresa en el sistema de referencia elegido como:
Ec. 1 donde:
v=ds/dt
es la rapidez con la que cambia la posición, esto es la celeridad; es positiva cuando s es creciente y negativo en caso contrario. ds es el arco infinitesimal de curva recorrido. T es un vector unitario tangente a la curva
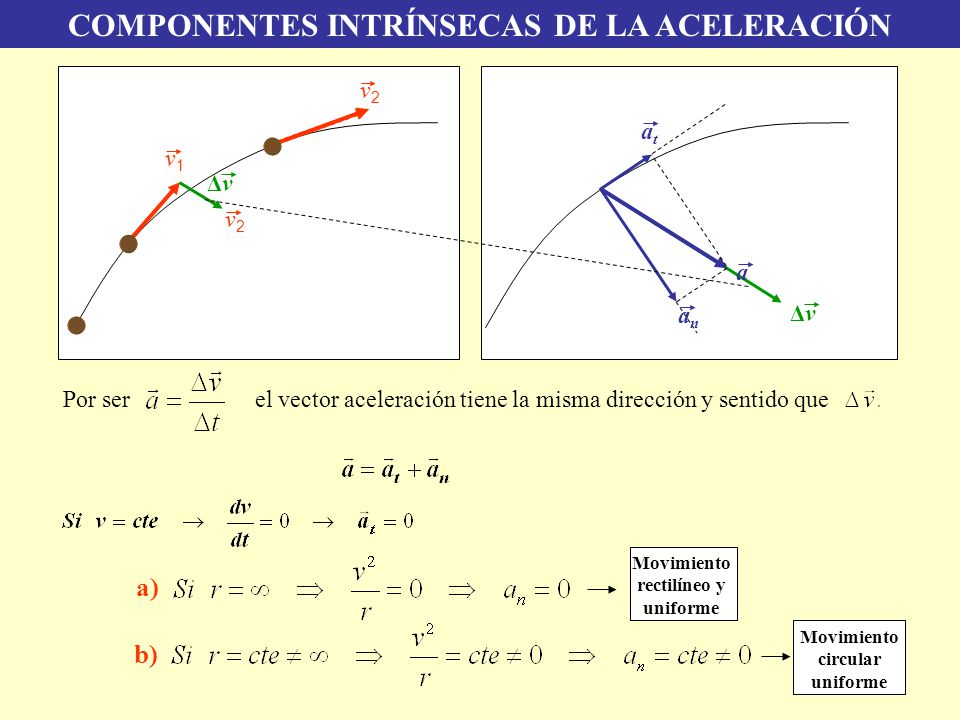
La aceleración se define como:

y, utilizando la ecuación 1, podemos obtener la aceleración en el sistema de referencia elegido, que se expresa en dos componentes, en la forma:

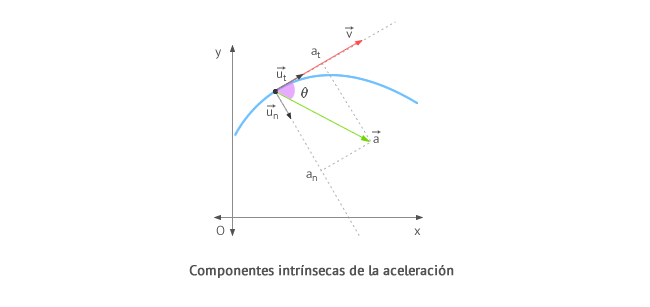
El cálculo de la aceleración normal es de gran importancia en aplicaciones prácticas en el diseño de los tramos curvos de carreteras, ferrocarriles, en el movimiento de fluidos sobre superficies curvas, en el diseño de mecanismos que giren,… Así pues, en el sistema de referencia elegido, la aceleración de un punto P se descompone en las componentes tangencial y normal, como se puede ver en la Figura 2, en la forma
No hay comentarios.:
Publicar un comentario